
Modellbasierte Regelung von Turboverdichtern
Motivation und Zielstellung
Turboverdichter verfügen zum anforderungsgerechten, energieeffizienten und sicheren Betrieb über mehrere Regelkreise. Dabei sorgt die Pumpgrenzregelung dafür, dass der Arbeitspunkt stets im stabilen Betriebsbereich (grün) des Verdichters liegt. Stand der Technik sind hierfür PID-Regler, die dann in den Prozess eingreifen, wenn der Arbeitspunkt sich über eine sog. Regellinie in Richtung des instabilen Bereichs (rot) bewegt. Unter Berücksichtigung der Dynamik der Regelung wird die Regellinie in einem ausreichend großen Abstand zur Pumpgrenzlinie, die den stabilen Betriebsbereich begrenzt, festgelegt. Infolgedessen wird der Verdichter häufig nicht im Bereich des maximalen Wirkungsgrades betrieben.
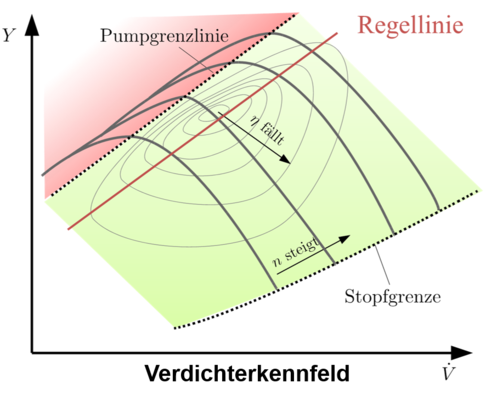
Ein neuartiger Ansatz der Pumpgrenzregelung besteht in der modellprädiktiven Regelung. Hierbei wird ein Modell des Verdichters genutzt, um zukünftige Verschiebungen des Arbeitspunktes zu prädizieren und ggf. vorausschauend in den Prozess einzugreifen. Ein besonderes Ziel liegt in der Verringerung des minimalen Abstandes des Arbeitspunktes von der Pumpgrenze, um bisher nicht genutzte Bereiche hoher Effizienz sicher anfahren zu können.
Ziel des Projektes war es, dieses neuartige Regelungsverfahren hinsichtlich der Praxistauglichkeit zu untersuchen. Dazu wurde ein Konzept für einen modellprädiktiven Pumpgrenzregler entworfen, prototypisch unter MATLAB/Simulink umgesetzt und anschließend anhand ausgewählter Szenarien getestet.
Modellprädiktive Regelung
Der Begriff modellprädiktive Regelung oder Model Predictive Control (MPC) beschreibt eine Menge von Regelungsmethoden. Die Gemeinsamkeit all dieser Methoden liegt in der Verwendung eines Modells der Regelstrecke.
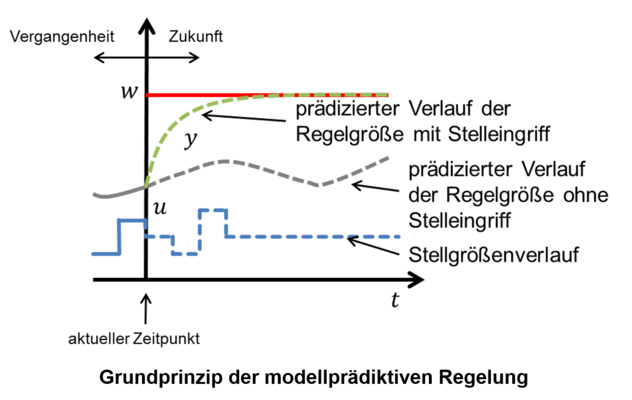
Dieses Modell wird im Regler dazu verwendet, um ausgehend von aktuellen Messdaten und Modellzuständen einen zukünftigen Verlauf der Regelgröße zu prädizieren. Auf Basis dieser Prädiktion wird ein Stellgrößenverlauf bestimmt, der laut Modell dazu führt, dass die Regelgröße einer Sollvorgabe folgt. Diese Bestimmung erfolgt durch Lösung eines Optimierungsproblems. Ziel ist es dabei, beispielsweise die vorhergesagten Regeldifferenzen und Stellgrößenänderungen zu minimieren.
Von dem berechneten Stellgrößenverlauf wird vom Regler nur der erste Wert als Stellgröße ausgegeben. Anschließend wird der gesamte Vorgang im nächsten Taktschritt auf Basis neuer Messwerte wiederholt.
Modellprädiktiver Pumpgrenzregler
Der entwickelte Regler verwendet die Methode der sukzessiven Linearisierung, ein spezielles nichtlineares MPC-Verfahren. Dies ist aufgrund der nichtlinearen Zusammenhänge bei Verdichtern und dem Ziel, einen großen Arbeitsbereich abzudecken, notwendig. Bei dem Verfahren wird in jedem Taktschritt das nichtlineare Modell am aktuellen Arbeitspunkt linearisiert. Anschließend erfolgt die Behandlung mittels linearer MPC-Methoden.
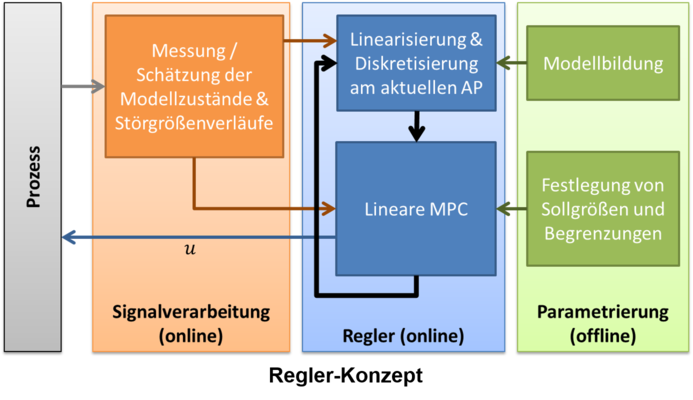
Die Implementierung des Reglers unter MATLAB/Simulink basiert auf eigens entwickelten MATLAB-Function-Blöcken. Diese werden mit fester Taktzeit aufgerufen und führen die gesamten Berechnungen aus. Dies umfasst beispielsweise die Linearisierung und Diskretisierung des Regelstreckenmodells, die Abarbeitung der MPC-Algorithmen sowie die Zwischenspeicherung und Extrapolation von Störgrößenverläufen.
Untersuchungen und Ergebnisse
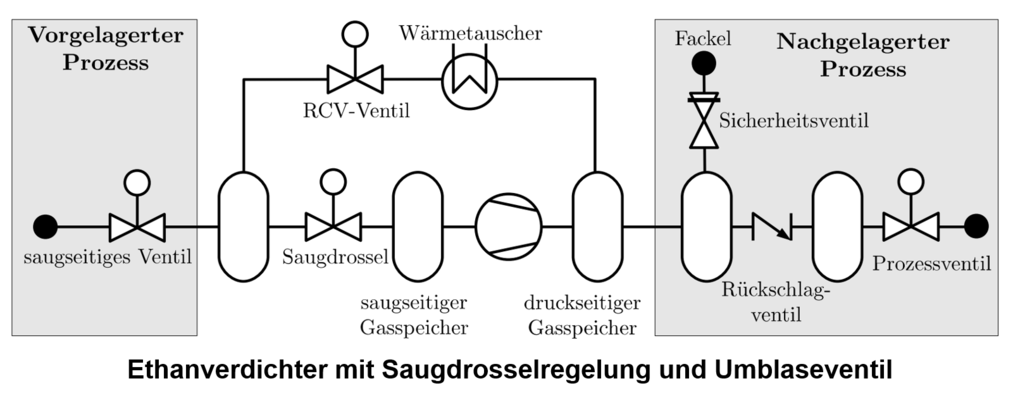
Um die Leistungsfähigkeit abschätzen zu können, wurde der MPC-Regler anhand verschiedener Regelstrecken mittels Simulationen getestet. Hierfür kamen validierte MATLAB/Simulink-Modelle zum Einsatz, die verschiedene typische Einsatzbereiche von Turboverdichtern abdecken, wie z. B. als Ethanverdichter.
Die durchgeführten Simulationen ergaben überwiegend positive Ergebnisse. Der Regler konnte bei allen getesteten Szenarien einen Wechsel in den instabilen Zustand zuverlässig verhindern. Des Weiteren war es möglich, den minimal zulässigen Abstand des Arbeitspunktes von der Pumpgrenze zu verringern und so den nutzbaren Betriebsbereich zu vergrößern.
Projektdaten
- Projektleiter
Prof. Dr.-Ing. Jens Jäkel
- Mitarbeiter
M.Sc. Robert Ritschel
- Laufzeit
04/2013 - 12/2013
- Kooperation
AviComp Controls GmbH, Leipzig
- Förderung
Förderung SMWK